
Optimizing Complex Haptic Simulations
The word “Haptics,” derived from Ancient Greek, pertains to the sense of touch or feel. Haptics can be incorporated into user interface designs to convey tactile information to the user. At its core, haptic technology enables users to receive tactile feedback through touch-based interfaces. This feedback can be as simple as a vibration indicating a notification, or as advanced as simulating the texture of different surfaces in a virtual environment.
Haptic devices generally fall into three categories:
- Tactile Haptics - Focused on skin-level feedback, such as vibrations or temperature changes.
- Force Feedback Haptics - Apply resistance or force, often used in robotics or VR (virtual reality) simulations.
- Ultrasonic and Mid-Air Haptics - Use sound waves to create the sensation of touch without physical contact.
Haptic technology has advanced greatly, from simple vibrations in early mobile phones to sophisticated force feedback systems in modern VR controllers, medical simulators, and robotic applications. Accordingly, the development of haptic devices has become increasingly complex and interdisciplinary, requiring expertise in engineering and user experience design. Product designers must selectively identify critical interactions that define the user experience and balance them with technology's limitations to create rich experience simulations.
Manta has been developing haptic products for over twenty years, starting with the Phantom force feedback device for SensABLE Technologies. This device delivered six degrees of freedom motion with three axes of force feedback, and was a dramatic paradigm shift in virtual touch and haptics.
Recent projects have become more complex, such as a haptic system that simulates the complex motions of sweeps rowing. This program pushes the limitations of technology and requires designers to balance technical constraints, user experience value, and cost/benefit analysis.

Case Study: Virtual Sweeps Rowing Training Tool
Sweeps rowing looks easy to the casual observer, but it is a very technique-intensive activity that requires precise motions, balance, timing, and teamwork. This makes the learning process complex, and mistakes on the water can be potentially dangerous. Most existing rowing products for training are simple exercise machines with little or no haptics. They do not replicate the motions or sensations of rowing on the water, teach users how to row, or help them perfect their technique.
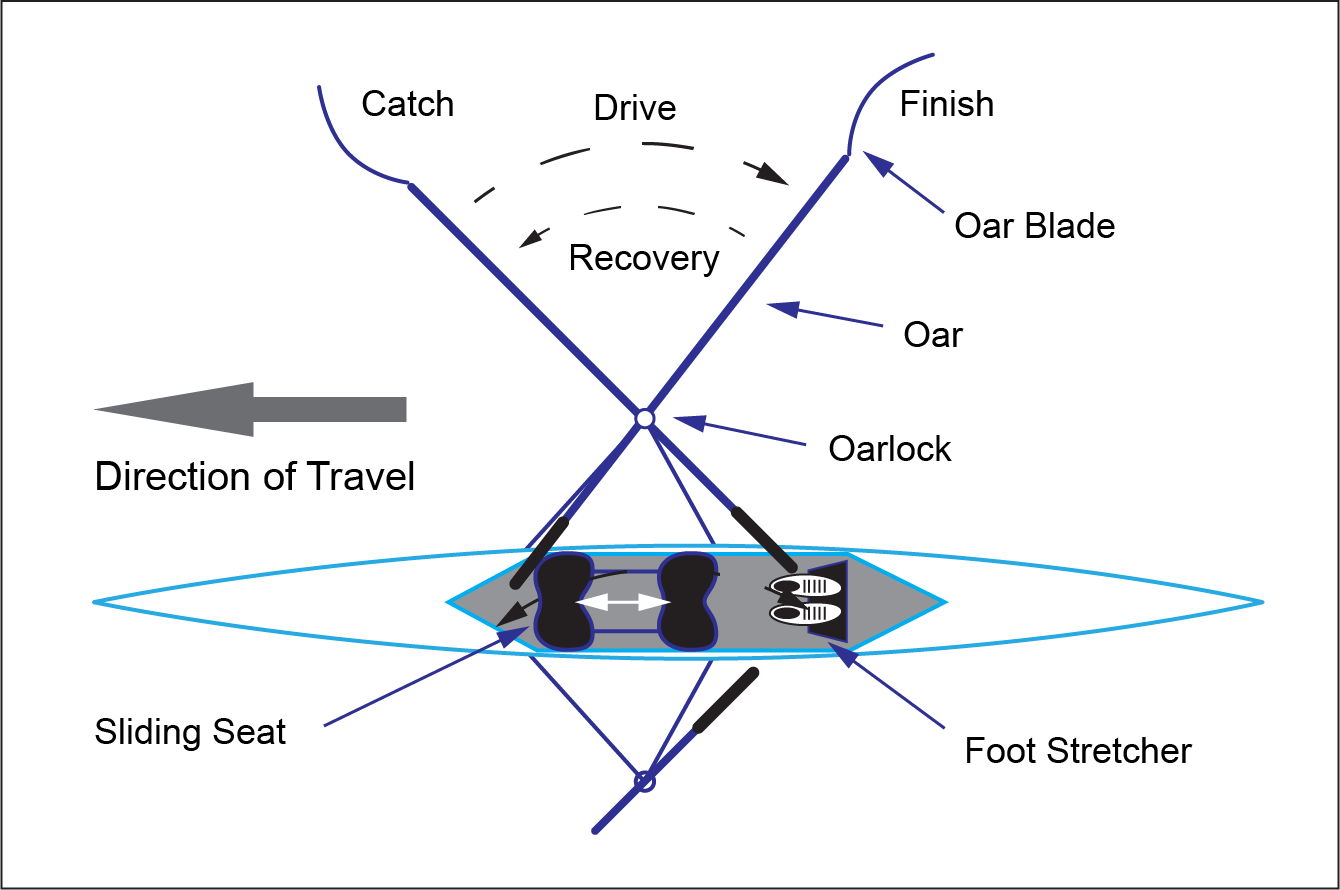
Figure 1 - Rowing Stroke
Sweeps rowing is a complex maneuver wherein the seat moves front-to-back relative to the boat as the rower completes an entire stroke cycle with the oar. The rowing cycle can be broken into the Catch, Drive, Finish, and Recovery phases (see Figure 1).
The cycle begins with the Catch where the oar blade enters the water and the rowers’ body is coiled, and the seat is in the aft position. The Drive follows as the rower uses a coordinated effort to extend their legs and body while pulling on the oar handle. The Finish involves lifting the oar blade from the water with the rowers’ seat in the forward position. During the Recovery, the boat glides, and the rower slides the seat aft and prepares for the following Catch.
Manipulation of the oar blade during the Catch and Finish is critical to efficiency and safety. The oar rotates horizontally as it leaves the water and returns to a vertical position in preparation for the Catch. Failure to master this maneuver will result in “Catching a Crab,” wherein the oar blade becomes hydraulically trapped in the water, and the resulting forces are directed back through the oar handle to the rower.
A high-fidelity training system must provide real-time experience, enabling users to feel realistic outputs from their rowing inputs. A haptic training device that provides haptic feedback in response to good or bad technique facilitates nuanced refinements that lead to greater rowing efficiency and performance. In addition, the long-term intent was to virtually link the effects of other users in a multi-person sweeps boat to train cohesive teamwork.
Manta’s Development Approach
Where do you start? The challenge of designing a complex user experience is identifying and prioritizing procedural tasks and validating them against the realities of technology limitations, implementation feasibility, and cost.
The first step in developing the haptic-based rowing simulator was to research and quantify all of the rowing-related motions and associated parameters, such as the speeds, torques, acceleration, friction, inertia, ranges of motion, and water-related fluid dynamics involved. To gather user and functional requirements, Manta identified and reviewed the existing literature and academic publications, interviewed numerous rowing experts and coaches, benchmarked existing rowing training and simulation equipment, and went out onto the water in sweep boats. In parallel, market research was performed to determine the business-related requirements, such as target selling price and associated manufacturing costs, market size, and associated yearly volumes.
It is important to identify the critical haptic sensations that simulate the on-water rowing experience. From the usability analysis work, the three key principal sensations identified were the oar stroke dynamics, the blade orientation dynamics, and the shell rhythmic motion in response to user forces and environmental interactions (water, wind, other rowers).
After capturing and understanding the rowing usability goals and requirements, Manta brainstormed, explored, and evaluated multiple electro-mechanical solutions for the critical rowing-related motions, associated degrees of freedom, and forces. This involved performing engineering analysis (FEA, Fluid Dynamics, etc.), component sourcing (motors, actuators, sensors, etc.), CAD layouts, ergonomic analysis, and manufacturing cost projections.
Oar Stroke Dynamics:
The oar stroke is the principal action performed by the user during sweeps rowing, and includes the Catch, Drive, Finish and Recovery phases. Replicating the dynamics of each of these phases is critical to recreating the forces and feel of the sweeps rowing stroke for training purposes. An experienced rower interprets the small nuances in oar stroke motion and force to continuously evaluate and correct their technique and to coordinate with teammates. Any perceivable deviation from the expected system response will remove the user from the illusion of reality.
To understand the boat's propulsion, think of the oar as a lever rotating about its blade inserted in the water. The oar is connected to the boat by an oarlock between the blade and handle. The rower’s feet are attached to the boat (shell) by the foot stretcher. The rower generates a propulsive force by pulling the oar handle away from the foot stretcher, creating a moment at the oarlock which drives the boat forward. The forces generated by the user pulling on the oar(s) are among the highest physically achievable. Peak force measured by elite rowers can exceed 300lbs and power can exceed 3000W (See Figure 2).
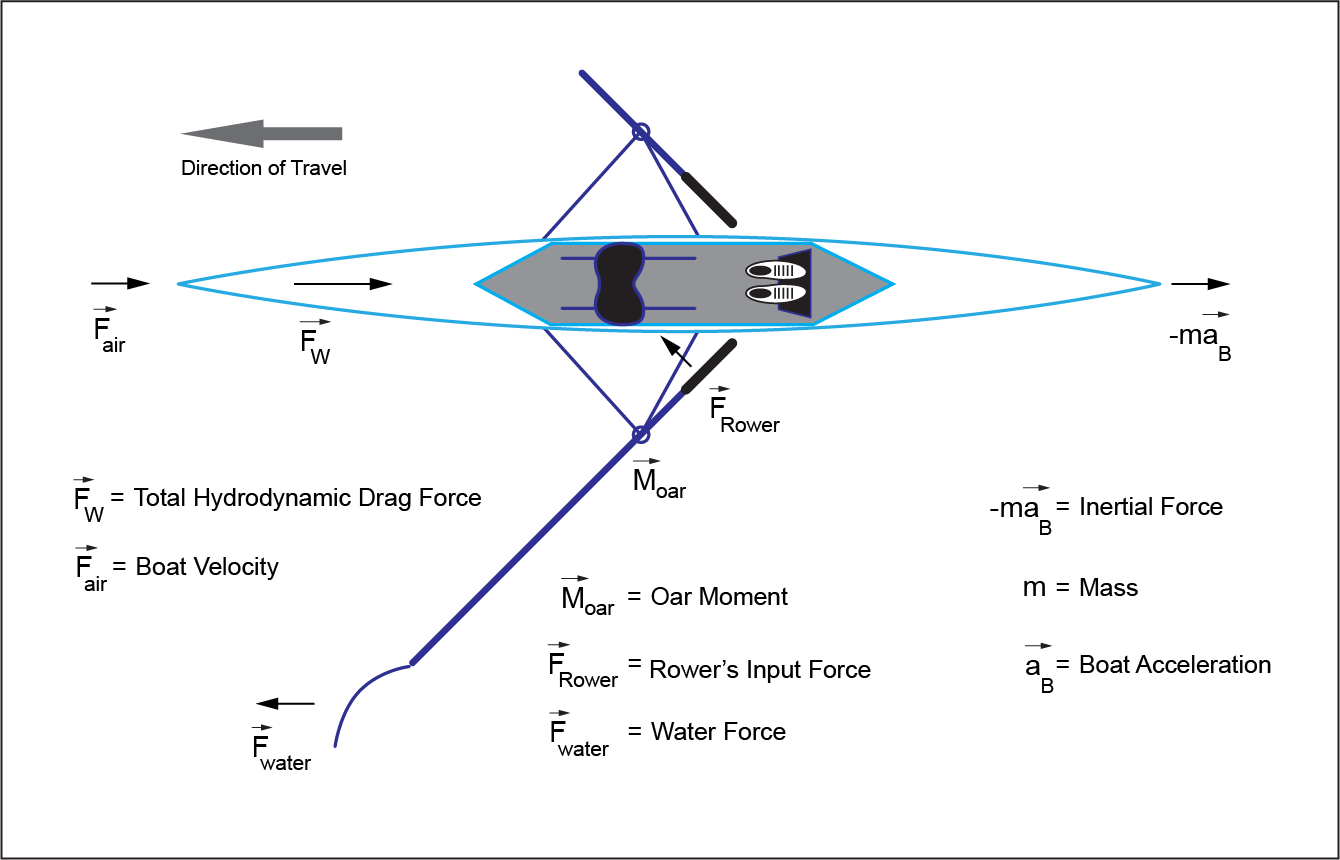
Figure 2 - Rowing Physics
Most existing rowing ergometer products use a flywheel-based resistance mechanism, which interacts with the user through a rigid handle attached to a flexible cord or chain. This method is limited to a single linear direction of resistive force that opposes the user’s motion but does not simulate or constrain the additional degrees of freedom (up and down, side to side) associated with sweeps rowing technique.
It's important for the new training system to impart the same oar constraints as in the boat, both to inform the timing of the rower’s actions and to maintain the illusion of reality. The most straightforward and realistic solution was to use the mechanical elements of an actual boat, i.e. the oar handle, oarlock, sliding seat and rail, and foot stretcher. Some adaptations were made in the interests of product practicality (i.e. shortened oar length with added mass).
The target haptic sensations experienced by the user during the oar stroke were accomplished by coupling the oar handle to a servomotor and an appropriately sized flywheel acting in series. The servomotor can be programmed to add the appropriate amount of acceleration to the flywheel to reproduce the handle force that matches the correct hydrodynamic coupling for each phase of the stroke.
While the above electro-mechanical design configuration can produce the necessary force and fidelity to reproduce the on-water experience accurately, the design of the trainer must also consider potential risks for the user. In the actual rowing experience, a common user error is “catching a crab” or mistiming the insertion of the oar into the water. The immediate feedback is that the water applies a large force to rotate the oar handle towards the rower. At its extreme, this force may eject the rower from the boat! In the training device, the servomotor can limit the amount of feedback torque applied to the oar, thereby providing immediate haptic feedback that an error in technique has been committed, without risking harm to the user. This force feedback can be combined with an additional method(s) of user feedback, such as vibration, an audible alarm, or a visual alert, to further emphasize that the user has strayed from proper rowing technique.
Blade Orientation Dynamics:
Another important aspect of proper rowing technique is the timing of rotational orientation changes to the oar blade relative to the water throughout the stroke cycle. The finish and recovery phases include changes to the axial orientation of the oar blade to minimize disruptions to the smooth rowing rhythm as the oar blade enters and leaves the water. An incorrect oar blade orientation will produce disruptive forces that the rower must counter and may cause the boat to become unstable or lose momentum.
The oar blade's full axial range of motion is approximately 90 degrees and is controlled by the wrist and fingers, with a very low nominal torque when the oar blade is out of the water. However, during the catch, drive, or finish phases, the oar blade can become hydraulically “trapped” in the water, resulting in significantly increased torque required to adjust the blade angle. Any technique error by the user may produce a very high feedback torque, which is amplified by the boat speed or the force applied to the drive stroke.
For the implementation of oar blade rotation-related haptic feedback, we initially considered a high torque-bandwidth servomotor. This solution would allow flexibility to tune the response of the oar orientation to closely mimic reality; however, this would add a great deal of complexity and cost.
Ergonomic analysis indicated that the timing of the haptic feedback is more critical than the magnitude of the force. Our research found that the effects of oar blade orientation can be felt through the oar axis of travel during the oar stroke. Therefore, it was decided that sensing the blade orientation and linking the haptic response to the oar stroke haptics could be used to provide meaningful user feedback and take advantage of the electro-mechanical design solution described in the section above.
Accordingly, the design solution for oar blade orientation dynamics was to provide relative force feedback to communicate a “correct” baseline experience that reminds users when they deviate from the target technique. In this case, it was determined that a simpler electric brake, used to add friction or lock the rotation of the oar blade, would provide a comparable degree of haptic performance at a fraction of the cost. As a cost comparison, using an electric brake rather than a suitable servomotor could reduce the actuator cost by approximately 90%.
Shell Rhythmic Motion:
In a sweeps boat, the rower’s mass and the rowing shell move at different rates during the course of each oar stroke cycle. During the Drive, the rower pushes on the foot stretcher as their legs move from a coiled position to a fully extended one, causing the rower’s mass to accelerate faster than the boat. This acceleration delta conveys the sensation that the shell is moving away from the rower’s center of mass. Conversely, during the Recovery, the rower pulls on the foot stretcher when recoiling their legs, causing the rower’s mass to decelerate more quickly than the shell, resulting in the rower feeling that the boat is moving forwards under their body.
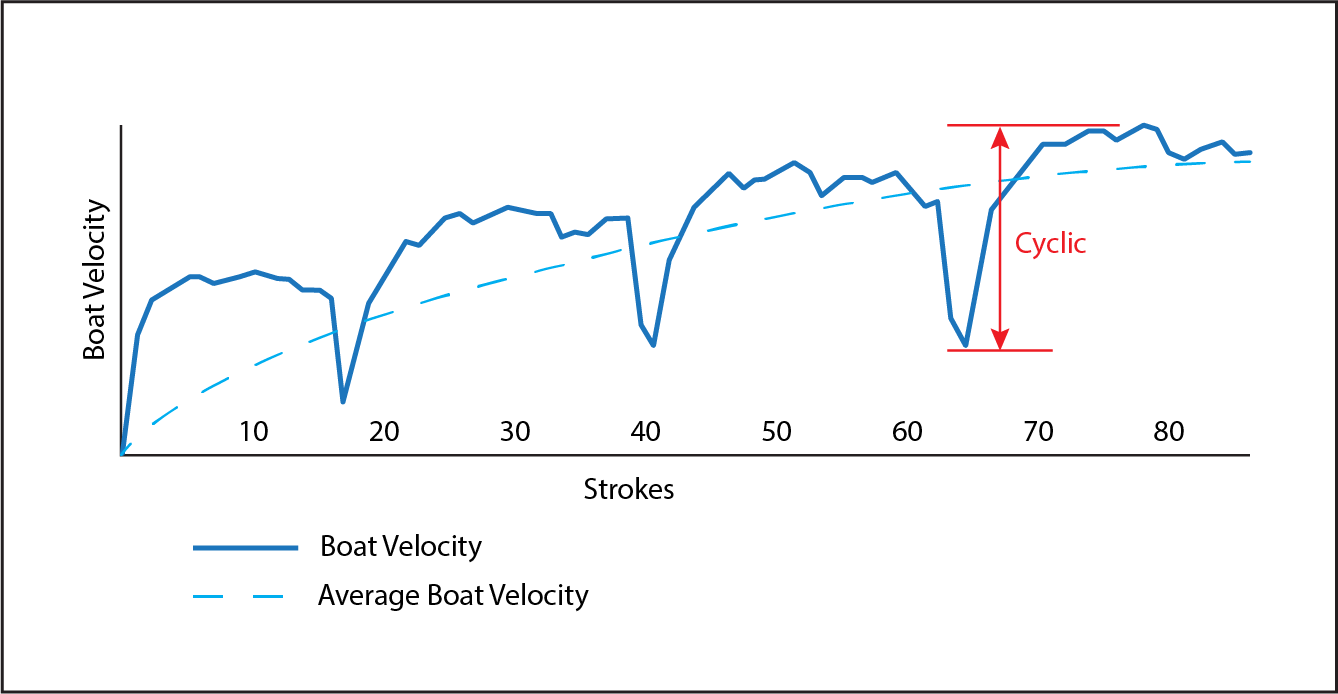
Figure 3 - Rhythmic Motion
The rower’s cyclic motion and the associated changes in acceleration during the oar stroke create the rowing shell's rhythmic motion and the corresponding sensation that the boat is moving fore and aft under the rower as they cycle through the rowing maneuver. The dynamics of the shell’s rhythmic motion are affected by a variety of factors, including the individual rower’s technique, timing, and mass relative to the shell. In a multi-person shell, the effects of the other rowers and the heavier shell are also felt by the individual rowers through the shell’s rhythmic motion. Therefore, it is important to provide haptic information related to the shell’s rhythmic motion to the user for training and technique improvement purposes, and it also contributes to the training device feeling more realistic to the experience of rowing on water.
On a traditional ergometer, the rower's seat is mounted on rollers that allow it to travel back and forth relative to the foot stretcher, which is connected to a non-moving base. This design provides freedom to perform the rowing maneuver but does not simulate the boat's rhythmic motion because the foot stretcher remains stationary to the ground. Some existing ergometers attempt to overcome this limitation by supporting the structure on sliding rails. This arrangement more closely approximates the shells rhythmic motion by allowing the “boat” and rower to move relative to each other to a degree, but it does not convey the effects of the other rowers’ mass and technique, the increased mass of the correspondingly larger/heavier boats, or the hydrodynamic drag of the water on the shell.
Our solution to more closely represent the haptics of the shell's rhythmic motion on water was to incorporate a sliding foot stretcher that is mounted to a linear rail similar to the above configuration, but also to add a flywheel that can be used to simulate the increased mass of the larger rowing shells, along with an actuator to simulate both the effects of other rowers, and the hydraulic drag of the shell in the water. Coupling the actuator outputs to the abovementioned oar stroke and blade orientation dynamics of both the individual and other virtually linked rowers provides the haptic feedback necessary to improve the rowers’ performance, while at the same time providing a more realistic immersive experience.
Summary
Haptic user interfaces can provide a rich user experience and convey valuable information. However, since implementing haptics into products/product user interfaces depends on the associated haptic-related hardware designs and technologies, these designs must be developed to balance hardware parameters such as size, cost, complexity, etc. with haptic performance, in order to achieve the optimum device configuration.
For the sweep rowing training device, Manta’s chosen haptic solutions prioritized a balance between training importance, realism, safety, and cost-effectiveness, aiming to provide a high-fidelity training tool that accurately replicates the nuanced sensations of rowing, while mitigating potential user injury and managing design complexity.
We can help with haptics!
Our experienced team of researchers, designers, and engineers can help you create a standout user experience, elegant enclosures, and cutting-edge electro-mechanical solutions. Get started now.